In recent years, due to the fast growth of the nanotechnology, more attention has been paid to the micro world. The researches in our laboratory have been translated to the field of the dynamics in the micro world. Main research subjects can divide into two parts:
1. Micro/nano manipulation and manufacture technology
2. Development and design of SOC (System-on-chip) technology
In the aspect of the micro/nano manipulation, automated precise assembly system will be developed. The depth information will be calculated by the binocular stereo. Then, the obstacle avoidance path and optimal path will be calculated by the central computer. In the end, the central computer will send the control signals to the piezo-driven precise stage for manipulating micro particles. Further, we will put emphasis on developing micro-injector and micro-tweezers to do advanced manipulation on cells.
In the aspect of the nano-manufacture, the SPM (scanning probe microscopy) will be used to implement the nanolithography, manipulate particles to arrange them to form special signs, or etch the surface of silicon substrates to form micro electric devices. All the above-mentioned are applications in the future.
Semiconductor technology is still based upon an
underlying assumption that Moor's Law will continue
unabated for another decade and it defines the
inventions required to enable this to happen. Implied by
this assumption is that density and local clock rates
will double every two years. Therefore, the concept of SoC (System-on-a-Chip) design is introduced to develop a tiny, light, low power consumption, and fast system chip with several subsystems cooperated. Since the SoC design is so complexity and difficult to verification.
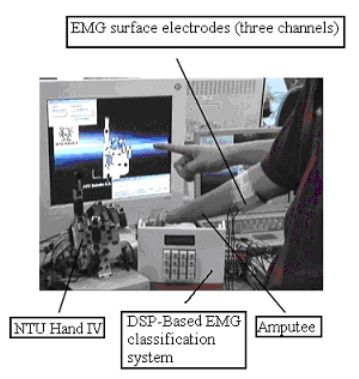
In our laboratory, we establish a fully SoC development environment, including system level design and simulation, hardware/software co-simulation, and mixed-signal circuit analysis, design, simulation, and layout, etc. we will put emphasis on developing and integrating silicon intellectual properties (SIP), SoC, and MEMS fields. For example, we are trying to use the concept of SoC design to integrate the tactile sensors, EMG discriminative module, and control module into a micro-control system in the integrated intelligent Prosthetic System project. Such micro-control system is implemented by SoC chip to achieve tiny, light, low power consumption, and convenient to carry purpose.