醫工組的研究方向著重在多手指人工義手與復健機器人的系統架構與研發。主要的研究內容包含了下列幾項:
1. 機械手的設計與控制
2. 肌電訊號控制系統的發展
3. 力回饋手套與虛擬實境之發展
4. 安全與復健機器人學
5. 大腦-計算機介面
機械手的設計與控制方面,必須考慮設計出來的手要接近人手的大小與重量,並且同時兼具靈巧性。經過了不斷的努力,目前最新的第四代人工義手NTU-Hand IV (圖一) 具有11個自由度,重量約為654克,工作空間如圖二所示。

圖一、NTU-Hand IV
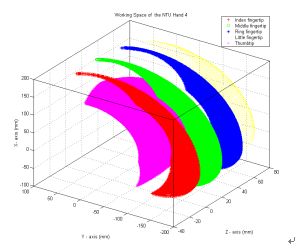
圖二、Workspace of NTU-Hand IV
肌電控制系統的研究方面,是藉著擷取肌肉收縮時所發生的電位訊號,經過特徵的擷取之後,利用類神經網路來辨識所要表達的動作,以期達到利用截肢病患殘存的肌肉來直接控制機械手。整個辨識的控制系統目前是利用TI
3x 的DSP來完成,未來為了減少電路的體積與重量,將會利用SoC的技術,將整個辨識與控制的系統利用一顆晶片來完成。
力回饋手套與虛擬實境的建構部分,我們利用鋼線控制操作者的位置與力量,並且利用RS-232將資訊送回電腦,然後再傳送給人工義手。使得操作者可以遠端控制人工義手的動作與力量,同時力回饋手套也可以反應人工義肢的狀態,如圖三所示。
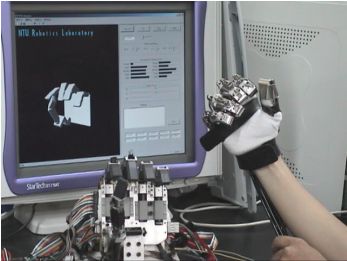
圖三、Data glove and virtual reality
安全與復健機器人學
由於高齡化社會及勞動生產力下降的問題下,下一代的機器人必須要可以直接且自然地與使用者進行物理性的互動。因此我們針對有關人機互動的議題,特別是安全的物理性物互動方面,發展一個在未組織過的環境中,整體考量使用者意圖、機器人執行效能及互動安全性的智慧型安全機器人系統。主要包含五個主要的研究題目:
- 安全互動與系統效能之規範發展
- 本質安全之致動方式及機械設計
- 應用於撓性關節機器人之阻抗控制
- 基於視覺系統之人類意圖辨識
- 及時性安全運動規劃及控制策略
本實驗室的最終目標是整合上述之研究主題於一實際機器人系統,使得此機器人系統將可以憑藉由表情辨識、共同注意力、行為決策三個子系統所共同組成之意圖辨識系統,配合上安全機構、進階控制理論與及時性安全運動規劃及控制策略,達成自主性與人進行安全互動之功能。
同時,針對主被動的復健及力量增強問題,我們先對廣義的人機系統進行理論上的分析,利用自行發展的彈性耦合驅動方式,設計開發出一個彈性耦合機器人系統。此一系統可針對不同任務調整系統的力量輸出特性,做即時性互動,他可以利用事先設定的方式或動態調整的方式,產生適應不同患者的特定運動或特定的最佳化行為,具有提供有效率、安全且舒適的行為外,也可使用於具有痙攣症狀的病患上。
在未來,基於此一概念,我們將設計出一全身力量放大的機器人系統,可以用來幫助正常人或不正常人,提高他們的運動及負載力量。
大腦-計算機介面
這幾年來有許多的實驗室開始進行大腦與外界溝通介面的研究,目的是為了讓人類能利用腦波來與外界溝通。使用腦波的好處是,對於中風病人、漸凍人、行動不便的老人、或是患有神經肌肉骨骼疾病的重症病患,腦波是唯一能夠被使用來控制的訊號,即使病人無法行動,也可以利用腦機介面來主動地控制週遭的環境。
因此本實驗室使用「大腦-計算機介面(Brain-Computer Interface, BCI)」其中的一種方法P300,其原理是利用刺激之閃光,來激發P300腦波訊號,經由辨識法則後,可以控制手肘復健機構,使得中風、脊髓損傷..等重症病患,得以使用腦波獨立自主的產生復健運動與支持運動。而P300辨識的準確率目前最高可達100%,平均辨識一個字的時間為30秒。
未來為了能使病人能更方便的使用腦波訊號,目標將會放在降低辨識一個字的時間,且也會研究有關無刺激源之腦波訊號分類,例如想像動作之分類,並擴展更多的腦波應用範圍,像是使用腦波訊號來控制七軸機器手臂和輪椅之應用,使得人類能有更獨立與美好的生活。
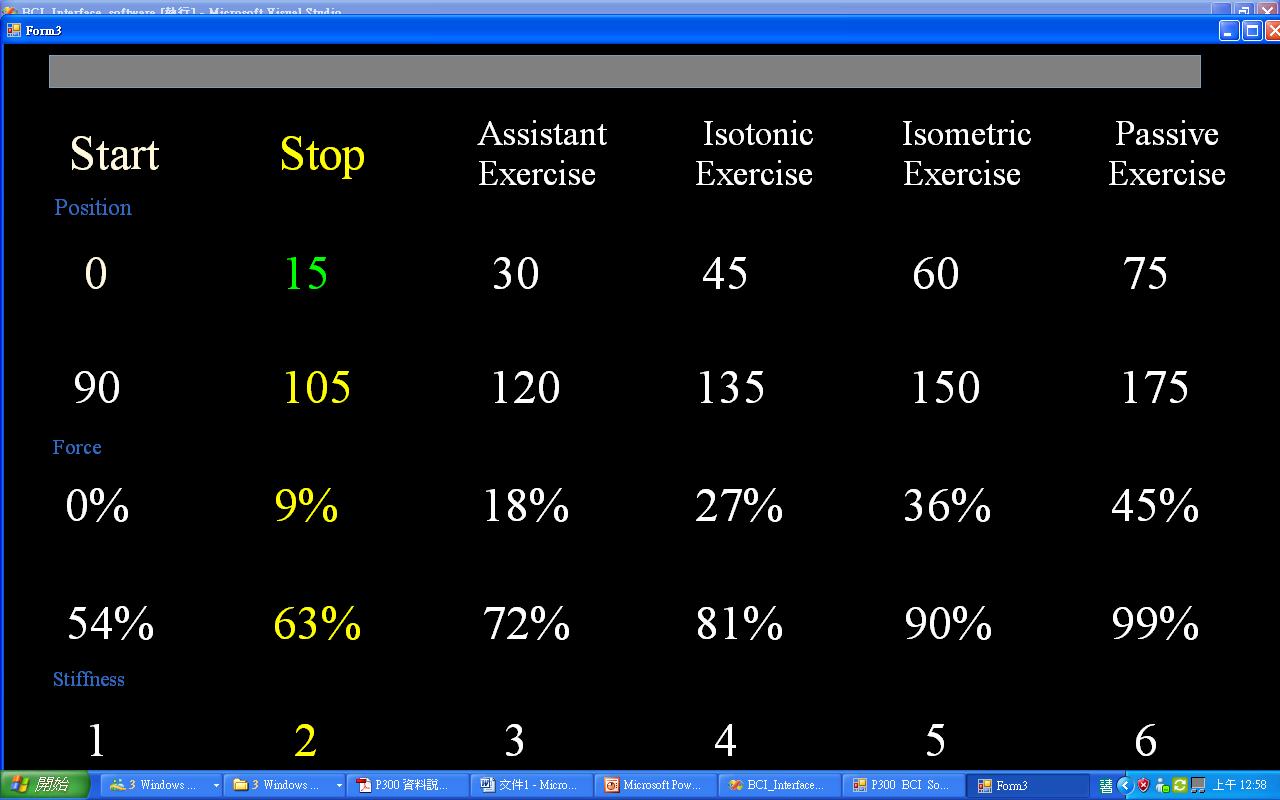
圖一、控制面板
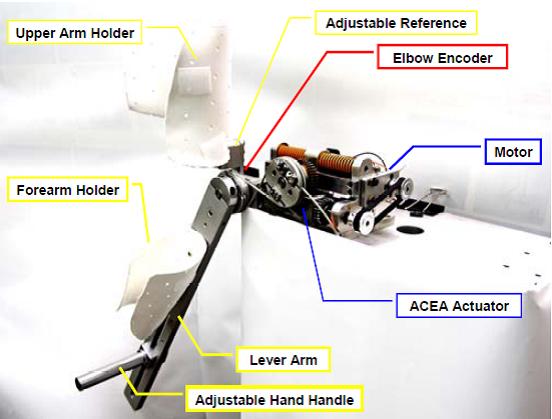
圖二、復健機構
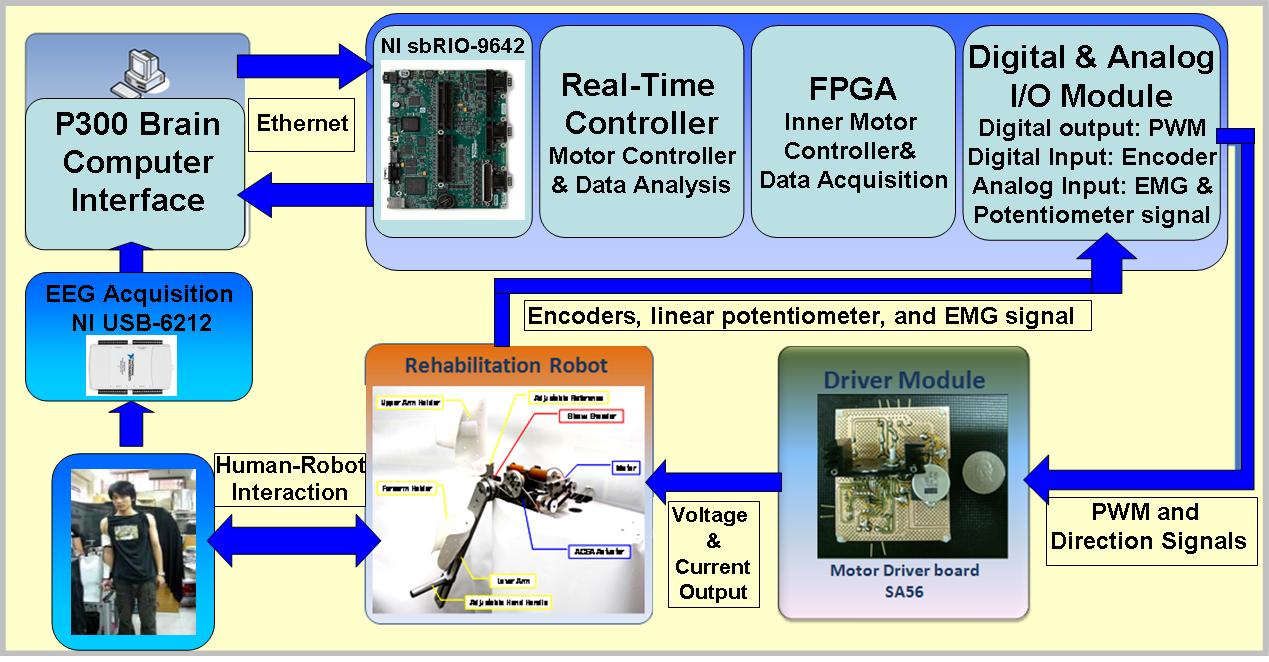
圖三、腦機介面與復健機架構 |